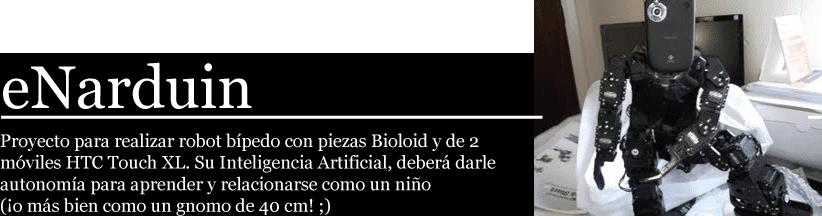
Hola, bienvenido al blog sobre mi proyecto personal eNarduin (o como dice mi mujer, eNardita). Consiste en la construcción de un robot bípedo principalmente con sensores, servos y frames Bioloid y piezas de 2 teléfonos móviles HTC Touch XL. Para ello, es fundamental la programación de una IA (inteligencia artificial) que controle sus mecanismos, sensores y -lo más importante- su inteligencia, que es (según Wikipedia): la propiedad en la que se relacionan habilidades tales como la capacidad de pensamiento abstracto, el entendimiento, la comunicación, el raciocinio, el aprendizaje, la planificación y solución de problemas.
No espero que nadie lea este blog, solo lo uso a modo de guía de trabajo para tener acceso a mis notas desde cualquier ordenador conectado a internet.
Introducción
¿De qué va esto? ¡Cuidado que aquí suelto la parrafada! Como a muchos informáticos, la IA es uno de mis sueños y pasiones desde niño. He leído, investigado, estudiado y creado "cerebros electrónicos" desde los distintos puntos de vista tecnológicos/informáticos que he ido conociendo. Este proyecto, surge porque veo que al fin existen medios suficientes y más o menos económicos para crear un cuerpo robótico "decente" para un nuevo proyecto de IA autónoma. Hoy en día puedes comprar servomotores, sensores y piezas de todo tipo y hacerte uno desde cero; puedes ahorrar dinero comprándolo en kits (como el Bioloid Premium Kit que uso) que trae 18 servos programables, unos cuantos sensores, piezas (frames) y un controlador principal (el CM-510) por un precio muy inferior que por partes manteniendo la libertad de hacer un robot como tú quieras. Debido a que necesito un par de cámaras wifi, 2 micrófonos más (el Bioloid ya trae uno), un altavoz, CPU potente y baterías independientes he recurrido a añadirle piezas de dos móviles HTC Touch XL (dichos recursos por separado son excesivamente caros, ni siquiera estarían muy miniaturizados y encima sería mucho más difícil programarlos) ¿por qué no aprovechar los móviles que ya tengo?
Conocimiento del entorno
Estoy utilizado un PC (más adelante usaré varios en clúster de alto rendimiento) que gestiona la IA y toda la información y control procedente de eNarduin (HTCs vía Wifi y CM-510 vía ZigBee). El robot posee los siguientes "sentidos":
- Visión estereoscópica. Sí, como los humanos, no solo puede ver y reconocer los objetos sino también entiende el concepto de profundidad en un entorno tridimensional.
- Reconocimiento de patrones auditivos (equivalente al oído). Al igual que el humano, también puede detectar el origen tridimensional del sonido.
- Es capaz de comunicarse en castellano.
- Sensores que permiten conocer la distancia de objeto a corta (infrarojos) y a larga distancia (ultrasonidos). Este conocimiento también le viene de la visión binocular (estereoscópica).
Inteligencia
Lo más importante y motivo de este proyecto, es la fuerte IA que estoy y estaré desarrollando durante muuuchos años con la inestimable ayuda de mi mujer, profesora de primaria, cuyo punto de vista pedagógico profesional me tiene intrigado.
Medidas
La medida del robot es de unos 40 cm; hacerlo más grande supondría un gasto inabordable ya que -sobre todo- los servomotores son del orden de x20 a x30 más caros -si pensamos en el tamaño de un humano de estatura media-.
Conclusión final
El objetivo está marcado pero hay grandes incógnitas de las que solo saldré adelante durante las investigaciones que tenga que realizar durante el proyecto. Por ejemplo: ¿hasta dónde podré llegar con el reconocimiento de patrones visuales o auditivos? tras varias pruebas he comprobado que no dispongo de toda la potencia computacional que debería, y aunque voy a conseguir más recursos siempre estaré por debajo del umbral humano, por tanto tendré que limitar el conocimiento de eNarduin.
Existe una pregunta que no sé responder y seguramente, tarde muchos años en responder: ¿puede hacerse con los medios de que dispongo en un número de años conveniente?. Lo veo realmente difícil sabiendo lo que sé de los actuales métodos para "demostrar" IA; ésto es lo que más me motiva de este proyecto, pero lo que más tiempo me va a costar. Al menos ¿hasta dónde llegaré?